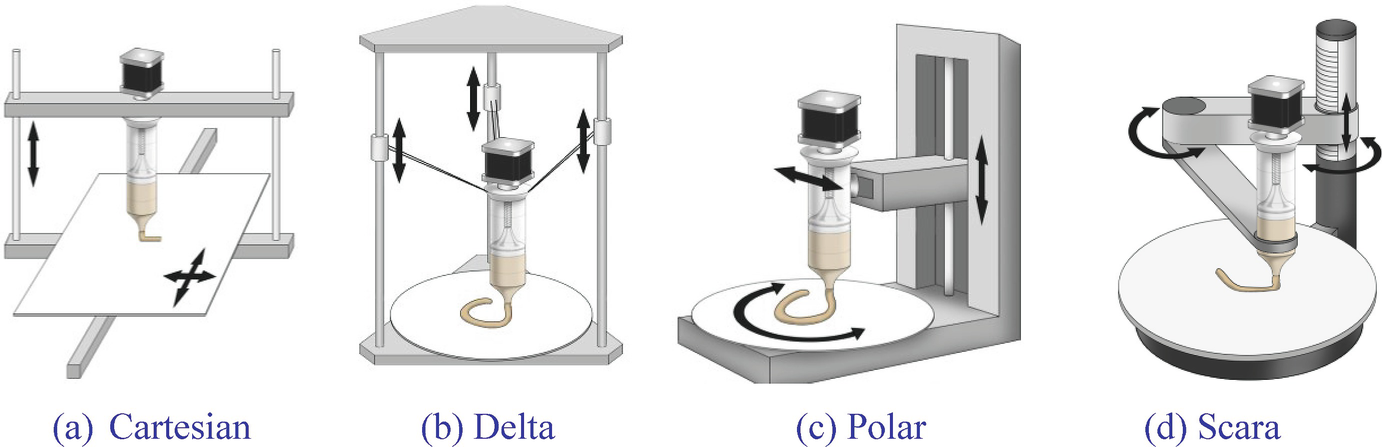
Każda drukarka 3D wykorzystuje własną kinematykę, która kontroluje ruch części mechanicznych: stolików (platform roboczych) oraz esktruderów. W tym artykule dokonamy przeglądu sześciu rodzajów kinematyki drukarek FDM: kartezjańskich, Delta, Polar i drukarek 3D z robotycznymi ramionami oraz HBOT / COREXY.
Drukarki kartezjańskie to najpopularniejsze drukarki FFF / FDM na rynku.
Kinematyka ta wykorzystuje trzy osie: X, Y, Z (kartezjański układ współrzędnych) do określania ruchów części mechanicznych: głowica drukująca i stół poruszają się zgodnie ze współrzędnymi.
Istnieje ograniczona liczba możliwych sposobów przenoszenia platform i głowic drukujących:
Platforma porusza się poziomo wzdłuż jednej z osi – X lub Y, ekstruder porusza się pionowo wzdłuż drugiej osi.
Platforma porusza się poziomo (Z), ekstruder porusza się dwuwymiarowo wzdłuż osi X-Y.
Platforma porusza się pionowo i wzdłuż jednej z poziomych osi, ekstruder porusza się poziomo.
Platforma się nie rusza, ekstruder porusza się w trzech osiach.
Platforma porusza się wzdłuż osi XY, wytłaczarka porusza się pionowo.
Drugi jest najczęstszy – platforma porusza się pionowo, a głowica drukująca porusza się w płaszczyźnie XY.
1. Kinematyka kartezjańska
Kartezjańskie drukarki 3D to najpopularniejsze drukarki 3D FDM dostępne na rynku. Oparta na kartezjańskim układzie współrzędnych matematycznych, technologia ta wykorzystuje trzy osie: X, Y i Z w celu ustalenia prawidłowego położenia i kierunku głowicy drukującej. W przypadku tego typu drukarki platforma robocza zwykle porusza się tylko w osi Y. Głowica drukująca pracuje zaś dwuwymiarowo na płaszczyźnie X-Z.
Układ, w którym stolik porusza się w osi Y, głowica w osi X i podnoszona jest w osi Z. Przykładem takich drukarek jest drukarka Prusa I3 MK3S. Wiele jest opartych na tej konstrukcji drukarek chińskich producentów takich jak Ender 3, Geeetech A20 oraz pochodnych. Często ten układa jest nazywane po prostu Prusa. Zaletami tej konstrukcji jest jej prostota, jeden silnik krokowy odpowiada za ruch w osi X, jeden w osi Y oraz dwa w osi Z. Zdarzają się też konstrukcję w których dla osi Z stosowany jest tylko jeden silnik. Wadą takiej konstrukcji dla której w osi Y (najczęściej) porusza się stolik jest waga samego stolika, dlatego nie można osiągnąć dużych prędkości.
Inną wariacją takiego układu jest stolik poruszający w osi Z, a głowica porusza się w osi X i Y. Zaleta to to, że stolik porusza się tylko góra – dół, przez co jego masa bezwładna nie ma tak dużego znaczenia. Przez taki układ jednak zwiększamy jednak masę pozostałych dwóch osi.
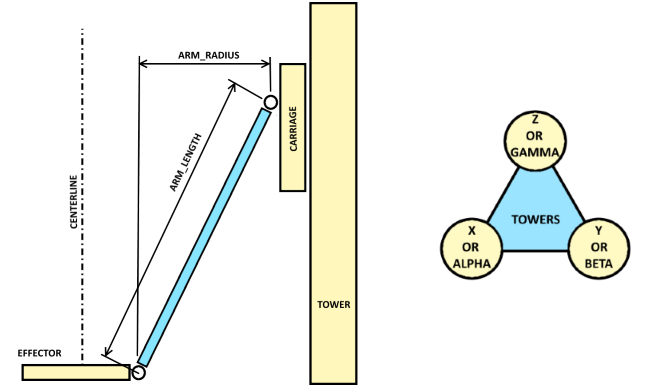
2. Kinematyka Delta
smoothieware.org
Drukarki Delta różnią się od drukarek kartezjańskich zarówno zewnętrznie, jak i w sposobie pracy. Główna różnica polega na sposobie, w jaki ektruder porusza się w stosunku do stołu drukującego. Stół w Deltach jest nieruchomy, za ruchy każdej osi odpowiadają zawsze trzy silniki, wykorzystując moc matematyki do poruszania ekstruderem. To wykorzystywanie matematyki okupione jest zapotrzebowaniem na moc obliczeniową. Zdarza się, że moc obliczeniowa 8bitowych sterowników opartych na Arduino nie wystarcza. Trzeba wtedy sięgnąć po procesory 32bitowe.
Zwykle delty w budowie nie posiadają jakiś wyrafinowanych części poza samym wózkiem i ramionami. Trudniej je zbudować i później skonfigurować. Maszyny delta, takie jak Rostock i Kossel, wykorzystują trzy osie liniowe w konfiguracji trójkątnej. Ramiona mają na końcach zamontowany wózek z głowicą. W deltach stosuje się esktrudery typu bowden by zredukować masę, która porusza się podczas drukowania. Są szybkie ze względu na niską ruchomą masę, zwłaszcza w osi Z.
W porównaniu z drukarkami kartezjańskimi, kinematyka Delta pozwala na większą prędkość, ale zapewnia mniejszą dokładność. Powodem jest fakt, że ruch głowicy wymaga jednoczesnego działania wszystkich trzech silników, co prowadzi do błędów w pozycjonowaniu współrzędnych. Wyobraźmy sobie ruch w osi X. By uzyskać go w tradycyjnej drukarce wystarczy poruszyć jednym silnikiem, w deltach trzeba równocześnie poruszyć trzema! Delta świetnie nadaje się do drukowania okrągłych przedmiotów, a przy tym bardzo hipnotyzuje obserwatora.
3. Kinematyka CoreXY i H-Bot
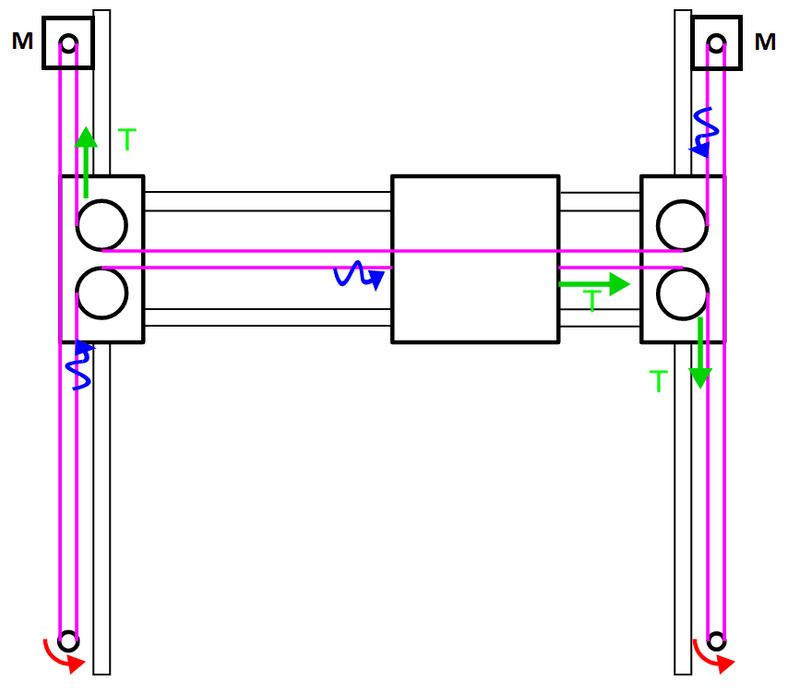
H-Bot i CoreXY czerpią z tej samej koncepcji ruchu. H-Bot jest prostszy i łatwiej wyobrazić sobie w jakim kierunku musi poruszać się silnik by obrać właściwy kierunek. CoreXY jest rozwinięciem H-Bot, eliminując jego wady.
W H-Bot gdy oba silniki obracają się w tym samym kierunku, ekstruder porusza się wzdłuż osi X, a gdy obracają się w różnych kierunkach, wytłaczarka porusza się wzdłuż osi Y. Gdy jeden z silników się nie porusza, wytłaczarka porusza się po przekątnej.
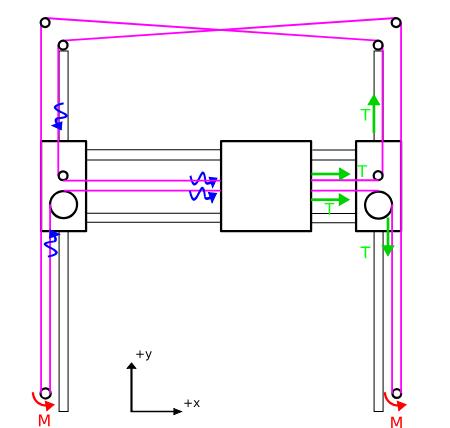
CoreXY to kinematyka w której dwa silniki pracują w połączeniu, aby sterować ruchem X i Y. Kinematyka równoległa CoreXY (głównie) oznacza, że silniki, zwykle największe źródło bezwładności w drukarce, są nieruchome. Pozwala to na duże przyspieszenie. Obracanie obu silników w tym samym kierunku powoduje ruch w osi X. Obracanie obu silników w przeciwnych kierunkach powoduje ruch w osi Y. Obracanie silników w różnym kierunku i różnymi prędkościami pozwala na uzyskanie dowolnego kierunku poruszania się głowicy.
4. Kinematyka Polar 3D
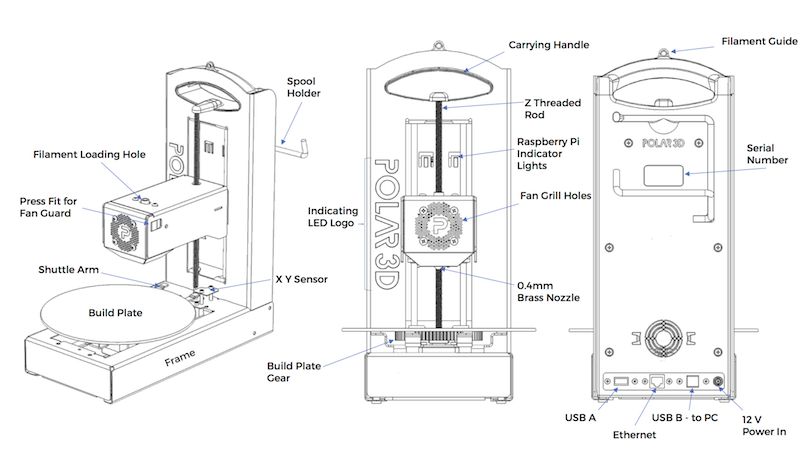
Ten nowy i interesujący projekt polar jest reprezentowany na rynku przez firmę o nazwie Polar. Wykorzystuje współrzędne biegunowe – oznacza to, że położenie jest określane przez promień i kąt zamiast powszechnie używanych osi XYZ. Platforma robocza drukarki jest okrągła, obraca się i porusza poziomo w jednym wymiarze, podczas gdy ekstruder porusza się tylko w górę i w dół. Wyobraź sobie gramofon i obracającą się płytę winylową. Głowica drukująca jest jak igła, a platforma jest jak płyta. Różnica polega na tym, że ta druga nie tylko się obraca, ale także porusza się w jednej z osi, Podczas gdy głowica ma ograniczony ruch tylko w Z.
Kinematyka Polar 3D pozwala ograniczyć wielkość drukarek. Drukarka taka najlepiej wykorzystuje pole robocze w stosunku do wielkości jej samej. Dlatego na stosunkowo małej drukarce można zbudować nieco większe modele. Dodatkowo, podczas gdy drukarki 3D, takie jak drukarki kartezjańskie i Delta, zwykle wymagają 3 silników do zasilania każdej osi, wymagają tylko dwóch. Jest to teoretycznie bardziej wydajne pod względem zużycia energii.
5. Drukarki 3D z robotycznymi ramionami

Ramiona robotyczne używają ekstrudera zamiast chwytaka. Oprócz funkcji manipulatorów i drukarek 3D, przemysłowe ramiona robotyczne mogą wykonywać spawanie, malowanie, frezowanie i wiele innych funkcji. Nie muszą drukować warstwa po warstwie. Mają możliwość druku modelu w częściach. Wyobraźmy sobie, że drukarka ma wydrukować model drzewa. Kartezjańska drukarką będzie drukować warstwa po warstwie wszystkie gałęzie równocześnie. Drukarka robot może to zrobić inaczej. Może drukować jedną gałąź od początku do końca a później kolejną. Warstwy nie muszą byś równoległe do platformy, mogą być pod kątem. Ramię robota pozwala drukować nie w 3 osiach ale nawet w 4 i 5!.
Drukowanie 3D za pomocą robotycznych ramion jest stosowane głównie w środowisku przemysłowym. Najczęściej jest to druk z metalu, a ten na razie nie zagości w domowym zaciszu.
6. Kinematyka SCARA
SCARA (Selective Compliance Articulated Robot Arm) to konstrukcja kinematyki oparta na bloku poruszającym się poziomo dzięki mechanizmowi dźwigni linkowej.
Urządzenia wykorzystujące tę kinematykę są bardziej kompaktowe. Mają bardzo wysoką dokładność i lepszą powtarzalność niż tradycyjne manipulatory zrobotyzowane. Zapewniają niższy poziom hałasu i wibracji. Roboty SCARA są nie tylko dokładniejsze, ale także szybsze niż roboty kartezjańskie o podobnej wielkości i masie.
Ale te urządzenia są drogie, mają ograniczoną sztywność wzdłuż osi XY, mniejszy obszar budowy i ograniczony ruch.