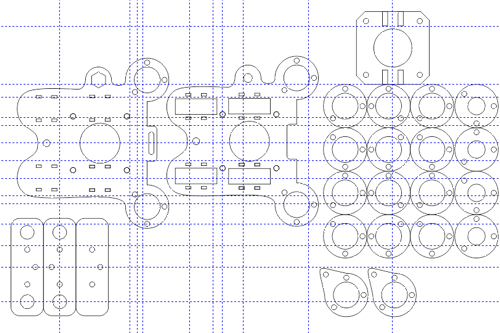
Po tygodniu czasu, przemyśleń w głowie, kombinowania projektowania części, wyszedł pierwszy projekt. W trakcie projektowania oczywiście zmieniały się koncepcje, rozwiązania problemów itd.
Ale to co się nie zmieniło w stosunku do oryginalnego smartrapa to:
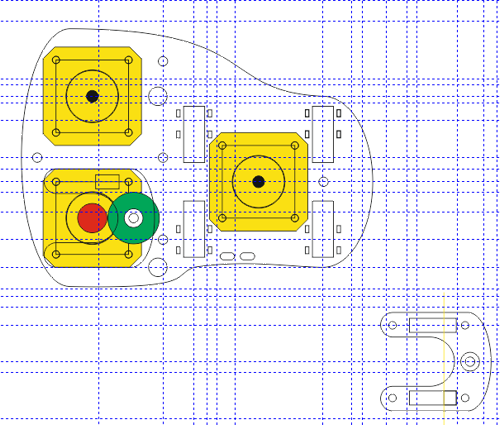
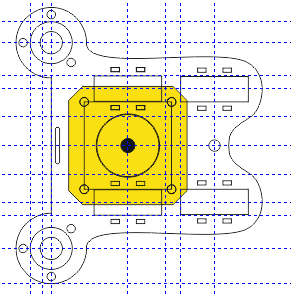
- zastosowanie 4 silników NEMA17 jak i ich ułożenia względem pierwowzoru
- zastosowanie wałków prowadzących i łożysk liniowych 8 mm do osi X Y Z
- zastosowanie pręta gwintowanego M5
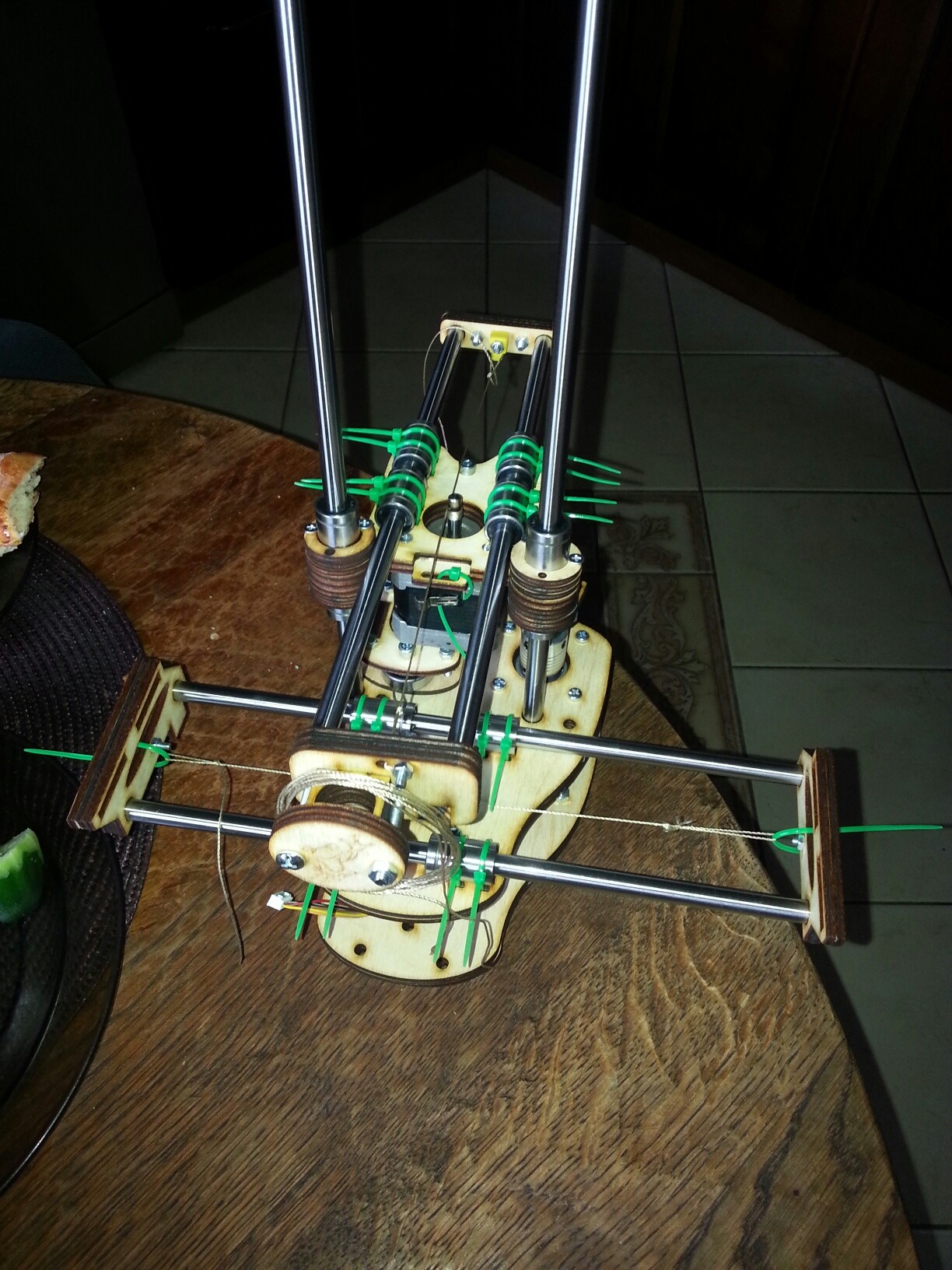
- radełka MK7 do napędu ekstrudera i łożyska 608 zz
- zastosowanie żyłki do poruszania osią X i Y
Zmiany jakie zastosowałem w Smartfrog’u:
- brak elementów drukowanych (chyba najważniejszych), wszystkie elementy ze sklejki 3 mm (wersja ekonomiczna i do prototypu) docelowo plexi lub poliwęglan (wersja PRO)
- dodanie sprzędła elastycznego aluminiowego do łączenia silnika z prętem gwintowanym osi Z
- zaprojektowanie nowego ekstrudera typu BOWDEN, podobne rozwiązanie jak w pierwowzorze choć trochę inne
- zmiana sposobu montowania stołu
- dodanie elementów stabilizujących/usztywniających pręty osi Z
- zaprojektowanie nowego mocowania pod głowicę
- kilka innych kosmetycznych zmian, które zostały wymuszone przez zastosowany materiał jak i sposób projektowania
Zastosowana elektronika w smartrap’ie to RAMPS, elektronika najbardziej chyba rozpowszechniona w środowisku REPRAP, ale w swoich założeniach chciałbym ją zastąpić Sanguinololu. Co ciekawe w projekcie Smartrap jest zastosowany servomotor G9 do automatycznego poziomowania stołu, podobno kłopotliwe ale w swoim projekcie zastosowałem opcję podłączenia tego rozwiązania jak i prostszej kalibracji za pomocą standardowych, mechanicznych endstop;ów.
Po zaprojektowania Smartfrog’a wysłałem do wycięcia laserowego projekt do firmy zajmującej się cięciem laserowym. Następnego dnia dostałem woreczek części i zabrałem się do składania swojego projektu…. cdn